-
基本求解
-
1.1.公式求解
-
- 梯度优化
- 智能优化算法
 老饼讲解:一步一步上手学习
老饼讲解:一步一步上手学习
【优化】一篇入门之-拟牛顿法-介绍
拟牛顿法是牛顿法的改进版本,它围绕牛顿法“用二次曲面来近似当前迭代点”的思路,然后降低二次曲面的精度,从而避免使用Hession矩阵H,降低算法的实现难度以及计算量,大大提高了可实现性,DFP和BFGS法都属于拟牛顿法,下面就一步一步来看看拟牛顿法到底是怎么干的吧!
一、初识-拟牛顿法
我刚开始学拟牛顿法时,他们直接就把拟牛顿法的公式砸我脸上来了,学得我云里雾里,所以这里我们放慢一点速度,一步一步来,先说说拟牛顿法到底想干什么,再根据它的思想,来整理出它的公式,好了,开干!
1.1. 拟牛顿法-背景-牛顿法
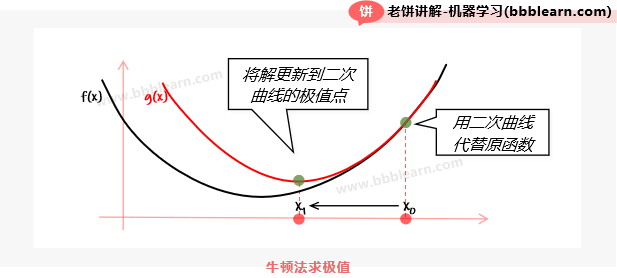
大家都知道二次优化算法就是用二次曲面来近似当前迭代点,从而将x迭代到二次曲面的极值点处:
而牛顿法作为二次优化算法的老祖,使用泰勒二次展开来获得二次曲面:
从而得到迭代公式:
虽然牛顿法用泰勒二次展开的方法获得的二次曲面是最理想的,但这样就导致最终牛顿法的迭代公式要求Hession矩阵H,往往很难落地,那怎么才能避开Hession矩阵呢?于是,各种拟牛顿法就登场了。
1.2. 拟牛顿法-思想
我们都知道,拟牛顿法仍然用的是牛顿法那一套,而它们要干的就是如何避开Hession矩阵,那它们是怎么干的呢?它们的做法是,降低二次曲面的近似精度,如下:
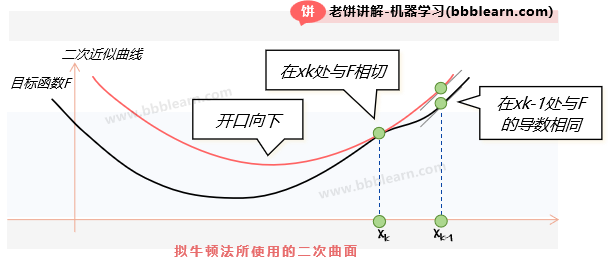
如图所示,拟牛顿法并不要求二次曲面在点附近完全的近似目标函数
而是只要求:
(1)在点与目标函数相切
这很好理解,既然是点的近似,肯定要在点相切,这样可以保持二次曲面与目标函数在点的一阶导是一致的。
(2)在点与目标函数一阶导数一致(即曲率一致)
这样进一步限制了曲面的曲率,使它更加迫近目标函数。
(3)二次曲面取得的是极小值
这个条件当作是补丁就行了,因为满足(1)(2)的曲面,可能会开口向下,这就尴尬了。
实际就是限制二次曲面的切点、开口宽度、开口方向
可以注意到,拟牛顿法并没有改变牛顿法中的切点,因此它们所用的二次曲面的常数项、一次项是一致的,所以从数学的角度来理解,也可以认为拟牛顿法是找另一个矩阵来替代牛顿法中的Hession矩阵或:
总的来说,拟牛顿法除了获取二次曲面的方法与牛顿法略为不同之外,其余地方与牛顿法一致。
二、拟牛顿法-迭代公式与推导
好了,既然我们知道拟牛顿法到底想干什么了,那下面我们就用数学来描述整个要干的事情,然后进一步就可以推导出拟牛顿法的数学表述,马上开干!
上面说到了,拟牛顿算法的核心就是如何找出符合以下三个要求的二次曲面:
要求1:在点与目标函数相切
要求2:在点与目标函数一阶导数一致(即曲率一致)
要求3:二次曲面取得的是极小值
那么,根据上述条件,我们就开始一步一步来推导吧!
2.1. 拟牛顿法-迭代公式
在处与相切的二次曲面可以表示为:
它的导数为:
令它的导数为0,即:
通过上式可求得它的最小解取值为:
因此,第k次的迭代量为:
其中,就是梯度,而呢,我们还不知道,那下面我们再具体来看看它需要满足什么数学条件,才能使上面的"要求2、要求3"成立。
2.2. 拟牛顿法-条件
先来看看要求2,它要求二次曲面在处的一阶导数与目标函数一致,即:
简化一下就可以得到,需要满足:
---------------我是分割线-------------------
再来看看要求3,它要求二次曲面取得的是极小值,事实上这等同于要求迭代量是一个下降量。而要保证迭代量是一个下降量,只需要是正定矩阵就可以了。
为什么B为正定矩阵时,h就一定是一个下降量呢?
不妨将 简记为,则有:
当B是正定矩阵时,也是正定,由可得, 这说明h与G方向不同,而梯度G是上升方向,所以自然就是一个下降方向了。
2.3. 拟牛顿法-公式总结
上面推导了这么多,我们来总结一下拟牛顿法的公式。
首先,拟牛顿法的迭代公式如下:
其中,是目标函数在处的梯度
然后,需满足如下条件:
(1) 满足拟牛顿条件:
其中,,即第次的迭代量
,即第次迭代后梯度的增量
(2) 是正定矩阵
要求是正定矩阵,是为了保障迭代量一定是下降量
值得注意的是,拟牛顿法还有另一种表示形式,它将上述公式中的替换为,此时拟牛顿法就相当于用替代牛顿法中的Hession矩阵。
三、拟牛顿法-各种实现
3.1. 拟牛顿法-具体算法
从上面的公式可知,拟牛顿法的只有条件要求,而具体的取值方法不是固定的,所以拟牛顿法是一类型的算法的总称,不同的取值方法,就是不同的拟牛顿算法.
常见的拟牛顿算法有:DFP算法,BFGS算法,L-BFGS算法,等等。
其中,BFGS算法是最常用的拟牛顿算法。L-BFGS算法则可认为是BFGS的"节省内存版本" 。
3.2. 拟牛顿法-迭代步长
拟牛顿法虽然提供了迭代点,但这更多时候仅仅作为一个迭代方向。
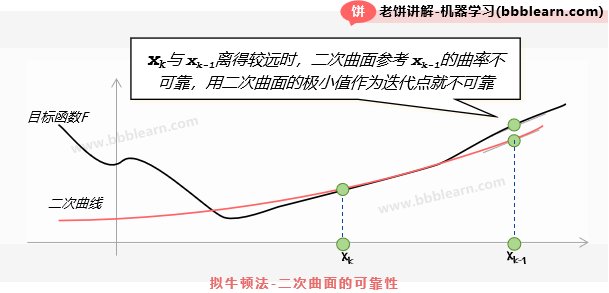
就牛顿法而言,它的迭代点未必是下降的,而拟牛顿算法的二次曲面更加的不准确,它的迭代点更加不可信,且拟牛顿法的二次曲面依赖于上一个迭代点,当迭代步长过大时,往往会使得曲面更加不准确。
因此,拟牛顿法一般会配以步长搜索算法,来确保拟牛顿法的稳定性,由于拟牛顿算法的迭代方向h是一个下降方向,即步长足够小时,朝该方向一定会下降。因此,拟牛顿法在配合步长搜索算法后,可以保障每次迭代都是下降的,也就确定了算法的稳定性。
常用的步长搜索算法有:线性搜索算法、可信域搜索算法等等。
四、拟牛顿法-算法流程
最后的最后,我们来展示一下拟牛顿算法的算法流程图,它与牛顿法是差不多的,具体如下:
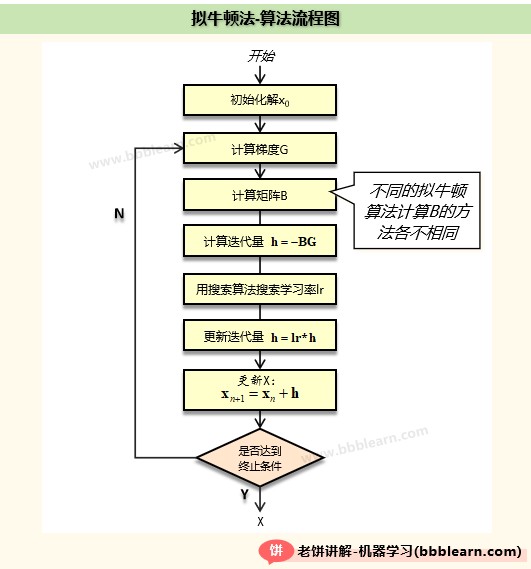
不同的拟牛顿算法在计算B时会略有不同,所以算法流程也会有所差异,但整体上是差不多的。
总结
总的来说,拟牛顿法就是牛顿法的改进,它牺牲了二次曲面的精度,用矩阵B来替代Hession矩阵,矩阵B只要满足正定、且满足拟牛顿条件就可以了,不同的拟牛顿算法就有不同的构造B的方法,常见的有DFP算法,BFGS算法,L-BFGS算法等等。
 评论
评论
